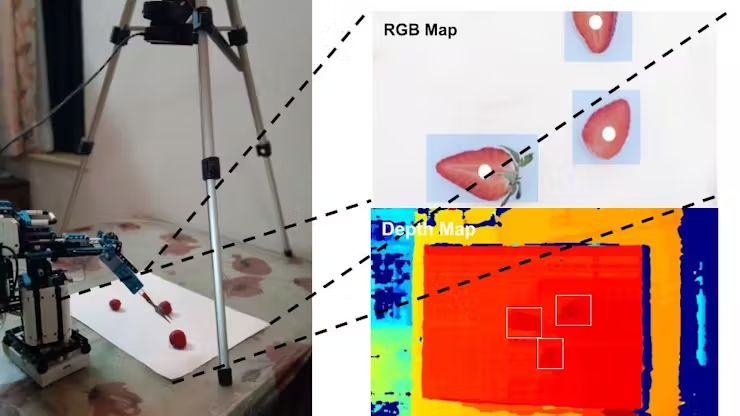
work In-Hand manipulation using RL Demo for the Robotic Grasping and Manipulation Competition (RGMC) at ICRA 2025 from the Robotic Manipulation Club Caltech Were RNNs All We Needed? A GPU Programming Perspective An implementation of parallelizable GRUs and LSTMs for CS179 in CUDA. TelloDrone Navigating unfamiliar environments with drone swarm and accurate localization FlowPilot - Your Agentic Co-Pilot FlowPilot - Turning Zoom Meetings into Actionable Slide Decks and Notion Workflows. Hivemind - Cursor for teams Organization-wide knowledge-sharing AI text editor with mixture-of-experts (MoE) orchestration. 1X world model challenge an attempt at the 1X world model challenge Jetpack Joyride Clone in C A complete Jetpack Joyride clone developed in pure C with SDL2, featuring file storage, probabilistic difficulty, and WebAssembly deployment. HapticCV: Depth-Assisted Bicycle Navigation Real-time obstacle detection on OAK-D for cyclists using stereo depth estimation, object tracking using MobileNet SSD and haptic feedback using neosensory buzz. Gelare: Prototyping Platform for Assistive Robotics Bringing robotic manipulation performing real-time computer vision with RGBD sensors to an accessible platform for prototyping assistive-robotic applications. EmotiConnect Real-time emotion detection NLP pipeline using OpenAI APIs, AWS Lambda, and Swift for haptic feedback systems. fun